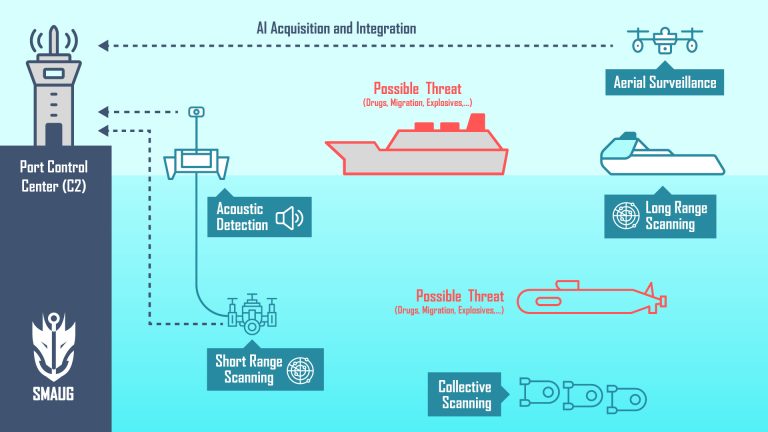
The SMAUG project aims to transform security monitoring in maritime ports all over the EU by delivering advanced capabilities for security management to enhance the detection of risks within the port facilities and their associated entry points. This effort is to be met by creating an integrated system including advanced components that meshes seamlessly together. The project will utilize cutting-edge AI algorithms to enhance the accuracy of security assessment by tapping into information from EU Maritime Ports. The SMAUG system is methodically designed to provide a huge mass of data for very delicate threat assessments, drawing together information from three fundamental components: the Security Infrastructure of ports, Front Line Underwater Detection Systems and Vigilant Surveillance Vessels.
Its main objective are as follows:
- Improve Port Community systems (PCS) and Cargo Community Systems (CCS): Improvements of the technological capabilities of the current PCS and CCS systems – underwater scanning processes, how these systems can be adapted and extended into the future. Improvement of PCS and CCS interoperability with C2 (Vessel Traffic System (VTS) and Ship and Port Facility Security (ISPS)).
- Improve Information Exchange: Improve the capability of the cooperative vessels and platforms located around the port to exchange security and other information. For surface ships, improve information exchange capabilities for maritime platforms. Unmanned Aerial Vehicles (UAVs) will be developed capable of inter-operating with Unmanned Underwater Vehicles (UUVs). Deployment of a Common Information Sharing Environment (CISE), a node and its driver(s) operated by port authorities at the ports of Valencia, Heraklion, Elfsina and Drammen dedicated to harbor activities (AIS) and interfacing with PCS.
- Develop and deploy detection systems: Acoustic detection system, High Resolution Sonar Inspection, Aerial detection system, Rapid Sonar Hull Scan, Underwater Vehicle swarm monitoring.
- Develop Surface and Underwater Vessel Control Portal: Develop Control portals for operation of surface and underwater vessels in accordance with the specific use cases and operation within a port environment.
- Develop Vessel features: (1) Docking Point Latch and Release: Develop an uncrewed docking point where the autonomous surface vessel can latch and detach to the dock remotely without physical human presence. (2) Surface and Underwater Vessel Operation: Develop an uncrewed surface vessel integrated with an underwater vessel. (3) SMAUG Unmanned surface vehicles USV1 Energy Source: USV1 will operate primarily from renewable solar energy from the inbuilt solar panels. Though, depending on the real-world power requirements additional electrical energy may need to be collected from the docking point. (4) SMAUG USV1, USV2 Navigation: USV1 will utilize navigation from Galileo / GNSS, so that autonomous waypoint navigation and position holding is possible.
- AI for security: Create more secure maritime ports and harbors through AI through combination of AI analysis of various sensors data sources, underwater and surface threat detection will be changed from a manual labor-intensive operation to an automated, notification-based system. Also, keep a continuous integration methodology to enhance productivity, faster deployment and detection of errors not only in the inference but also in the complete workflow.
- Screening capabilities: Anomalies will be identified below the surface of the water by automatically assessing threats that exist to ships both at harbor entrances and piers.
- Objective 8: SMAUG’s Validation: Three Use Cases that will be verified and validated through indicators, methods, and processes, for assessing the impact of the SMAUG solutions within the pilot demonstrations.
ITML’s role in the project
ITML is responsible for not only overseeing the preparation and delivery of the SMAUG control portal for maritime security information but also implementing information security and digitizing measures. This includes the management of autonomous and semi-autonomous vehicle functionality for underwater detection and control, in addition to monitoring data collection from various sources.
LinkedIn: https://www.linkedin.com/company/smaug/
X (ex Twitter): https://twitter.com/SMAUG_EU